摘要:介电弹性体材料由于具有大变形、高能量密度、生物化学兼容等优势,近年来成为制备软体机器人的热门选择,其相关基础理论研究吸引了国内外专家学者的高度关注。粘弹性作为影响介电弹性体非线性动力学的一个重要因素,研究其在随机环境下对介电弹性体的影响具有重要意义。本文研究了压力扰动作用下具有粘弹性的介电弹性体球膜的随机响应。首先,采用弹簧和缓冲器组成的流变模型表示介电弹性体球膜的粘弹性,基于虚功原理建立了介电弹性体球膜拉伸比的运动方程。其次,在介电弹性体球膜的平衡状态下,利用高斯白噪声表示压力受到的扰动,通过平移变换和泰勒展开,得到了拉伸比随机扰动的运动方程。采用广义胞映射方法计算了随机扰动的平稳概率密度,研究了随机扰动的一阶矩随各参数的变化关系。最后,分析了正弦电压和随机压力对介电弹性体的P-分岔的影响。本工作为介电弹性体球膜在软体机器人方面的应用提供了理论参考。
关键词:介电弹性体球膜;广义胞映射;P-分岔;随机压力
数学模型
考虑随机压力对介电弹性体球膜的动力学影响,可以得到考虑粘弹性的介电弹性体模型为

其中

这里变量λ表示介电弹性体球膜的拉伸比,ξ表示缓冲器的变形,c表示阻尼系数,μ表示剪切模量比,P0表示压力,ΦDC表示直流电压,ΦAC表示交流电压,Ω表示交流电压的频率,Γ表示弹性松弛时间,压力的随机扰动ζ采用高斯白噪声的形式。
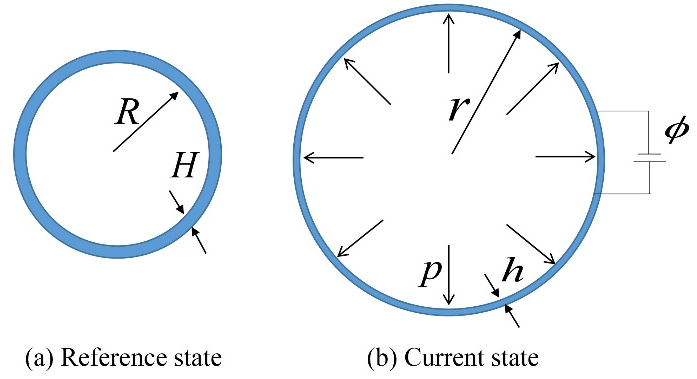
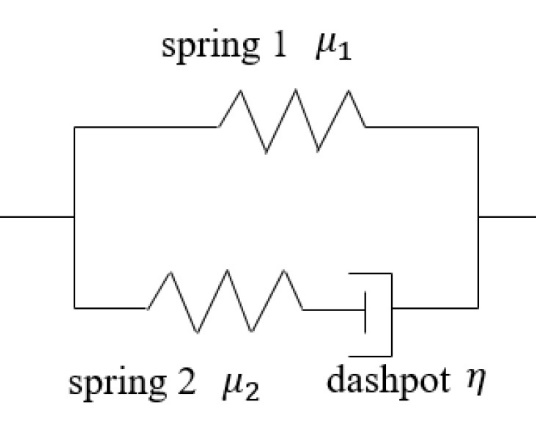
图1. 介电弹性体球膜及表示粘弹性的流变模型
主要结果
1. 探究了系统参数对系统平衡的影响
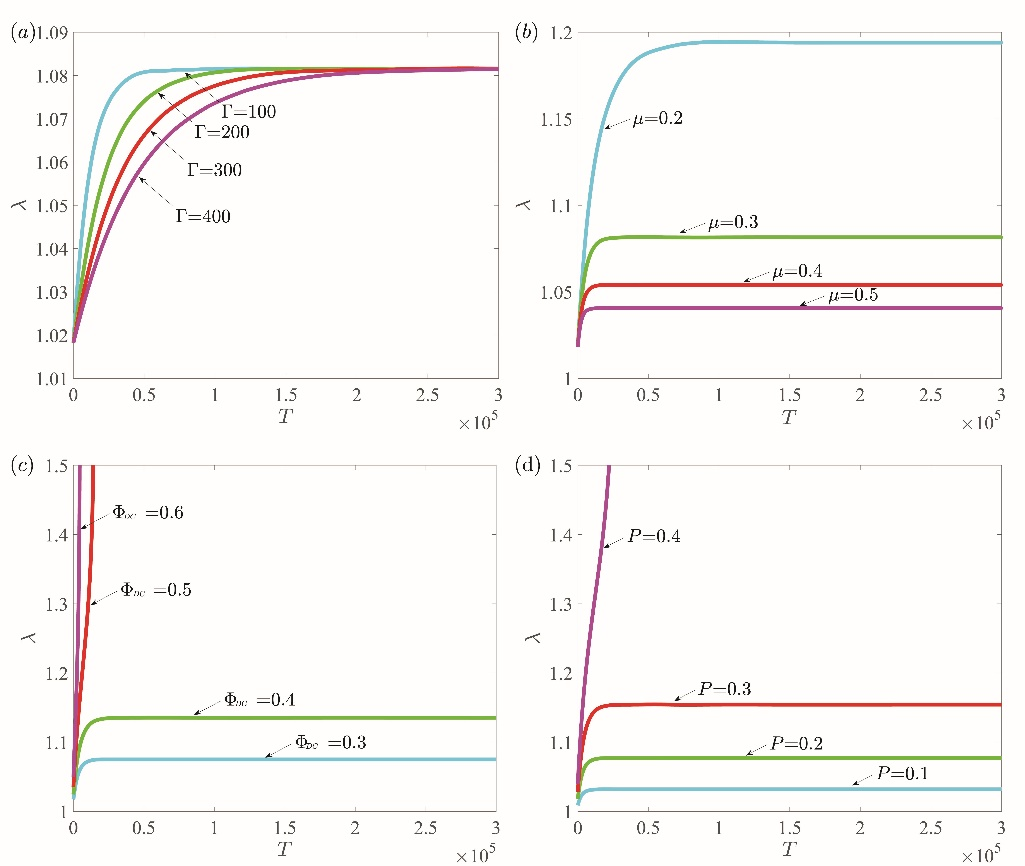
图2.介电弹性体球膜拉伸的时间历程图
弹性松弛时间只会改变系统平衡的时间,但不会改变平衡的位置;剪切模量比的增加会导致系统平衡时间和位置同时减少;当施加在介电弹性体球膜上的电压Φ和压力P0超过一定值时,系统最终不能到达稳定状态。
2. 发现了粘弹性系统的机电不稳定现象
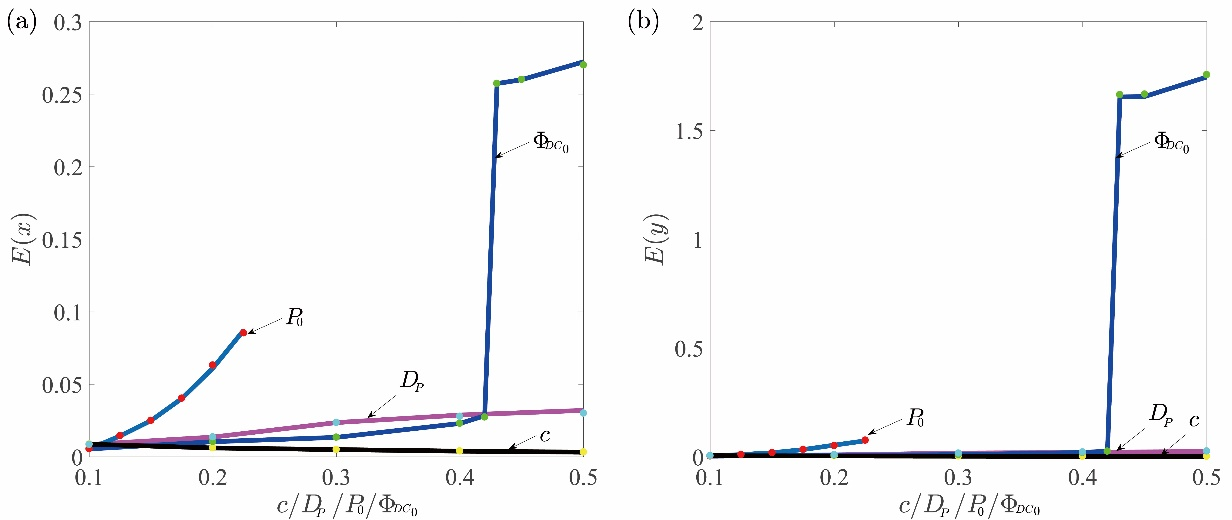
图2. 拉伸比扰动的一阶矩
系统扰动随阻尼的增大而减小,随噪声强度、电压和压力的增大而增大。此外,当电压在0.425附近时系统会发生突跳,这种现象叫做机电不稳定性。当不考虑粘弹性时没有出现这个现象,说明粘弹性对系统的动力学有重要影响。
3. 揭示了正弦电压作用下系统的P-分岔现象
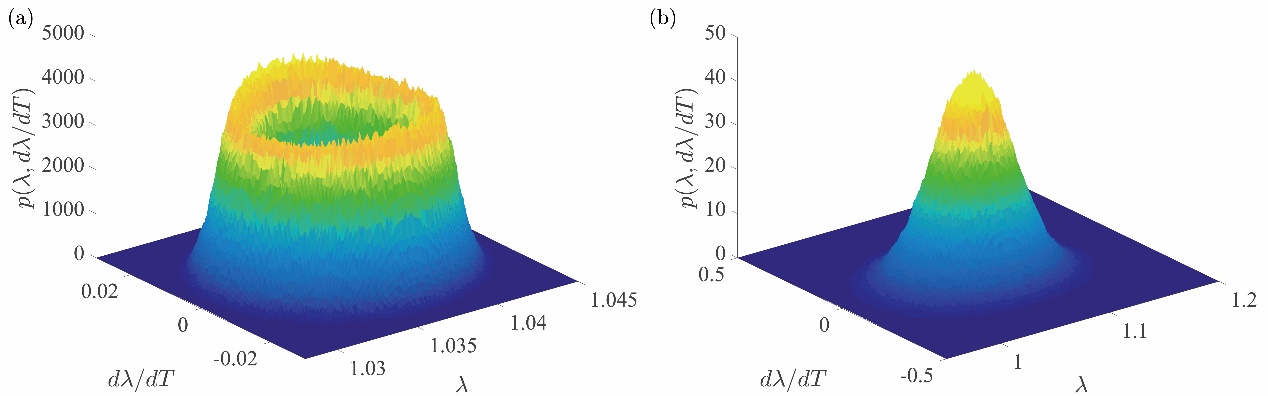
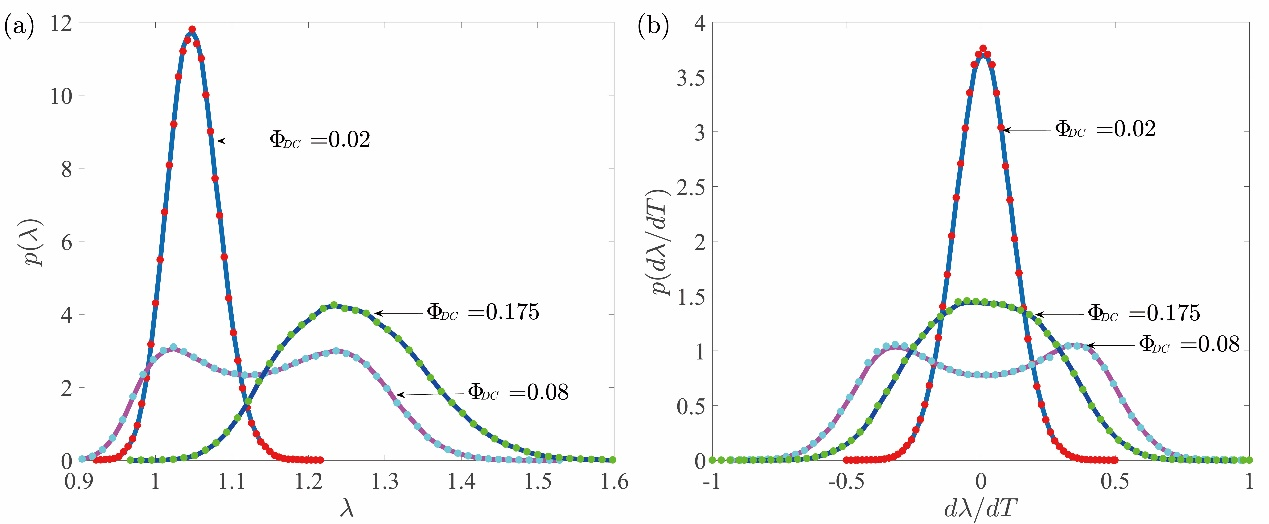
图3. 稳态概率密度图
当对介电弹性体施加正弦电压和随机压力时,稳态概率密度的峰值随着噪声强度、电压的变化会发生变化。这说明噪声强度、电压的变化会导致系统发生P-分岔现象。
文章链接地址:
https://www.degruyter.com/document/doi/10.1515/ijnsns-2020-0132/html
Dong, H., Du L., Hu, R.C., Zhang, S., Deng, Z.C. (2021) Stochastic dynamics of dielectric elastomer balloon with viscoelasticity under pressure disturbance. International Journal of Nonlinear Sciences and Numerical Simulation, 7.
原文PDF见附件



